分野別の評価結果
戦闘車両
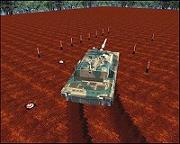
戦闘車両シミュレータの研究
車両を仮想的に試作することにより、車両の運動性能の評価が可能なシミュレータに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
新戦車
新戦車の構成要素のうち、小型・軽量化した機関と変速比を最適に制御可能な無段階自動変速操向機との組み合わせにより、高効率・高応答化を実現した動力装置の評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
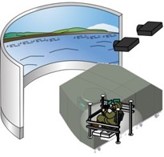
車両用多種環境シミュレータの研究
水際域等複雑な地形や海上の波浪環境下における、車両の機動性・操縦性等の予測、分析及び評価が実施可能なシミュレーション技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
モジュール型小型高出力ハイブリッド技術の研究
静粛走行機能、静粛監視能力及び車内・車外への給電機能を有するモジュール型小型高出力ハイブリッド技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
艦艇(水上艦)
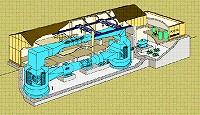
フローノイズシミュレータの研究
艦艇及び水中武器の音響性能及び流体力学的性能の向上を図るための極低背景雑音回流水槽(フローノイズシミュレータ)に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
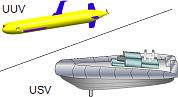
無人航走体構成要素の研究
無人水中航走体(UUV:Unmanned Underwater Vehicle)及び無人水上航走体(USV:Unmanned Surface Vehicle)で構成される無人航走体システムの構成要素技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
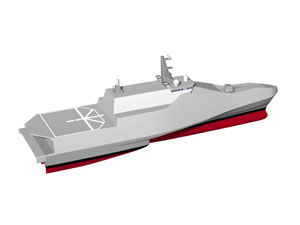
低シグネチャ艦艇技術の研究
将来の水上艦艇において、能力の向上した水中脅威に対応して我の被探知防止能力及び探知能力を向上させるため、さらなる低シグネチャ化を実現する先進的技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
先進推進システムの構成要素技術の研究
リム駆動推進器翼外周の流体力学的特性、運動性確保、船体へのインテグレーション技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
将来三胴船基礎技術の研究
高速航走性能を有するとともに、動揺を抑え、かつ排水量に比して広い甲板面積を確保できる艦艇用の高速三胴船に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
航空機(固定翼)
三音速風洞装置の研究
高性能化する将来の戦闘機、ミサイル等の空力性能を試験評価できる三音速風洞装置に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
高バイパス比エンジン技術の研究
燃料消費率に優れ、中~大型亜音速機用エンジンとして適した高バイパス比のファンエンジンに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
実証エンジンの研究
将来の超音速航空機等の推進装置として高運動対応、高推力重量比を図ったアフタバーナ付ターボファンエンジンに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
次期固定翼哨戒機用エンジンの研究
大型機用エンジンの成果を踏まえ、実証エンジンコア部の利用による開発リスクの低減と、ファンの高バイパス比化による燃費・騒音の低減を図り、次期固定翼哨戒機に搭載することを考慮した高バイパス比ターボファンエンジンに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
高運動飛行制御システムの研究
推力偏向パドルを用いた推力偏向機構と、FLCC(FLight Control Computer)及びACC(Actuator Control Computer)を連接させたエンジン・飛行制御統合技術(IFPC:Integrated Flight Propulsion Control)を適用した高運動飛行制御に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
スマート・スキン機体構造の研究
将来の小型航空機に適用される高強度/高剛性かつ軽量なスマート・スキン機体構造の実現に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
先進技術実証機(高運動ステルス機)
将来の戦闘機に適用される機体、エンジン等の各種先進技術のシステム・インテグレーションを図った高運動ステルス機の試作
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
将来戦闘機システムの研究(2)次世代エンジン主要構成要素の研究
高推力重量比化が必須となる次世代の航空機用エンジンのエンジンコア部主要構成要素に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
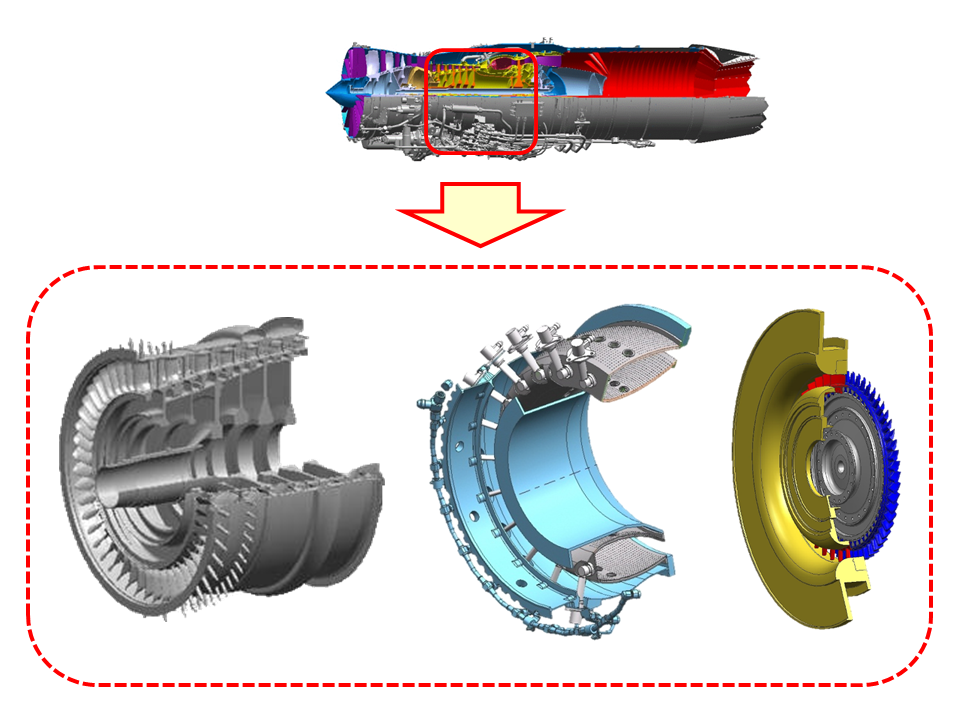 |
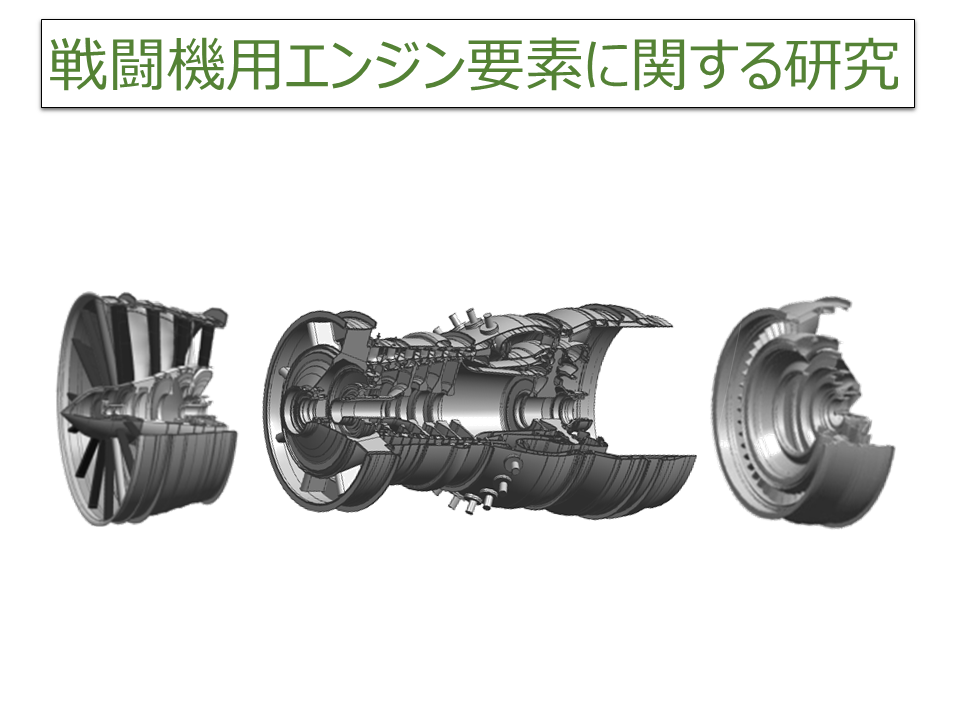
将来戦闘機システムの研究(11)戦闘機用エンジン要素に関する研究
ステルス性及び高高度/高速戦闘能力を確保するために必要となる、スリム化と大推力化を両立させた戦闘機用エンジン要素に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
戦闘機用エンジンシステムに関する研究
将来の戦闘機に搭載可能な、大推力かつスリムな次世代エンジンシステムの成立性について、プロトタイプエンジンを試作し、地上実証により確認する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
推力偏向ノズルの研究
将来の戦闘機の高運動性やステルス性に有効な推力偏向ノズルを試作し、地上実証により確認する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
火砲・弾薬
IED対処技術の研究
郊外及び都市部に敷設されたIEDの脅威から人員及び車両を防護するために、離隔してIEDの敷設位置を探知し、爆発物の検知・識別ができる器材に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
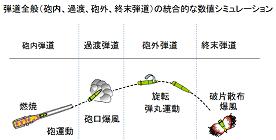
弾道シミュレーション技術の研究
火砲の射撃時における弾丸の弾道全般(砲内から弾着時の爆風・破片生成まで)をシミュレートし、高精度な弾道予測を行うことにより、火砲・弾薬のコンセプト検討及び試験評価等が可能となる弾道シミュレータに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
耐爆構造技術の研究
即製爆発装置(IED:Improvised Explosive Device)、RPG-7から発射されるロケット弾等の脅威に備え、各種装備品の乗員を防護する耐爆構造に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
艦艇(潜水艦)
超高張力鋼材の研究
一層の深度増又はペイロード増大に対応可能な耐圧殻用超高張力鋼材とその溶接、並びにそれを適用した場合の耐圧強度に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
潜水艦用燃料電池発電システムの研究
次世代潜水艦に装備し、潜水艦戦等の任務を遂行するために使用する、新型AIP(Air Independent Propulsion:大気非依存型推進)システム(燃料電池発電システム)のシステム化技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
先進船体構造技術の研究
対象脅威からの被探知確率の低減及び被弾後の損傷極限によって残存性向上を達成するための複合材製上部構造及び複合材と鋼材のハイブリッド主船体構造に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
航空機(回転翼)
哨戒ヘリコプター(艦載型)
艦艇と一体となって対潜戦、対水上戦を含む各種の任務を遂行するためのSH-60Jをベースとした哨戒ヘリコプター(艦載型)のメインローターブレード技術(疲労試験法)の評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
OH-1のフォローアップ
観測ヘリコプター(OH-1)搭載用エンジンの要素効率等を改善し、耐久性及び燃料消費率を向上させることにより、エンジンに関るライフサイクルコストを低減する改善型エンジンに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
将来ヘリコプターの耐衝撃性機体技術の研究
ヘリコプターの不時落下時の乗員生存性向上を図るため、落下時の衝撃を吸収し、乗員生存空間を確保する機体構造様式に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
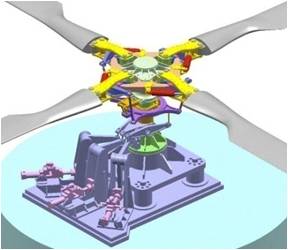
ヘリコプター駆動システム
将来のヘリコプターに求められる全天候性及び運動性に優れた揺動制御を組み込んだ一体型MDC(Major Dynamic Component:ヘリコプターの主要駆動系統)システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
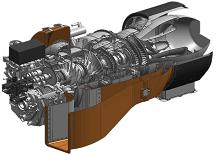
ヘリコプター用エンジンの研究
OH-1観測ヘリコプター用エンジン(TS1)の研究開発成果をベースとした出力増大型のヘリコプター用エンジンに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
個人装備
耐寒耐水服の研究
耐寒耐水服として最適な素材、デザイン、温度制御システム等を検討し、それらの結果から耐寒耐水服を仮作、試験評価し、それらの評価結果を基に耐寒耐水服のトータルシステムデザインの構築技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
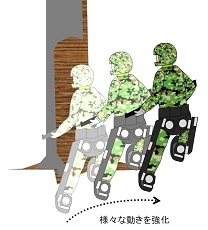
先進個人装備システム技術の研究(7)個人装備先進デバイス技術の研究
安全性を確保しつつ過酷な環境においても隊員個人の運動能力を強化する隊員用パワーアシスト技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
先進個人装備システム技術の研究
多様な戦場下において任務を効率的に遂行できる人間工学的に優れた将来個人装備システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
水中武器
マルチスタティックソーナー(信号処理部)の研究
複数の分散された音響ソーナー間で発信源と受信源が異なる方式のマルチスタティックソーナーシステムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
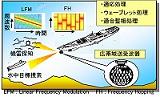
環境適合型ソーナー送受信方式の研究
送受信できる周波数帯域幅を広帯域化することで、捜索海域に適する送信信号を選択でき、それによって目標探知能力を向上させるソーナーに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
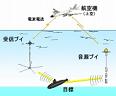
将来ソノブイシステムの研究
浅海域を含め、広域化した対潜戦に対処するため、航空機から海中に投下して使用する将来ソノブイシステムとしてのバイスタティックソノブイ関連技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
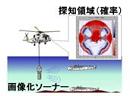
画像化ソーナー及び音波伝搬モデルについての研究
水中目標類別のための画像化ソーナー及び探知予察性能を向上するための音波伝搬モデルに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
ソーナーセンサ技術の研究
2オクターブの広帯域送波を実現するための送受波器設計方式に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
機雷探知機
危険物探知機として、埋没(埋設)物体を探知する低周波合成開口ソーナー関連技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
次世代潜水艦用ソーナー
艦艇変針時におけるえい航型ソーナーの探知性能劣化抑制を可能とする、アレイ形状推定技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
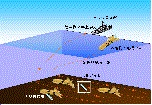
水中無人航走体長期運用システム技術の研究
長期間の水中航走を可能とし、長期間我が国の近海に留まり活動することを可能とする、燃料電池による無人水中航走体用発電システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
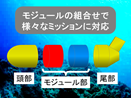
長期運用型UUV技術の研究
UUVの多目的化及び効率的な能力向上を可能とするUUVモジュール化技術並びにUUVの信頼性及び環境適応能力の向上に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
ミサイル
新アスロック
将来の護衛艦に装備し、潜水艦に対する対潜戦の遂行に寄与する新アスロックの超高速パラシュート関連技術の評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
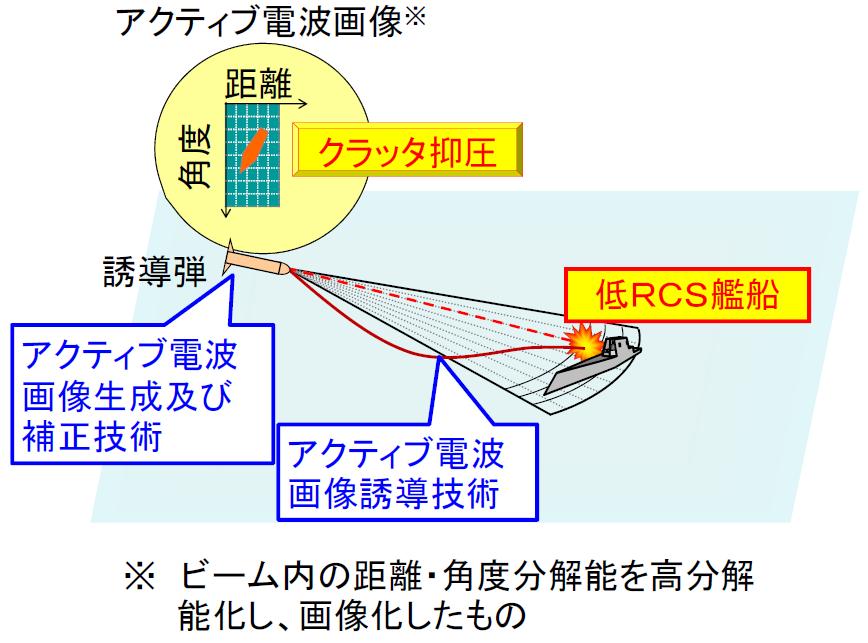
アクティブ電波画像
背景雑音(クラッタ)に比べて反射信号が小さく、かつ、移動速度が遅いためにドップラ周波数が低い目標の捜索・検知・追尾を可能とするアクティブ電波画像誘導方式に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
将来ネットワーク型多目的誘導弾システムの研究
多数の目標を同時かつ自動的に捜索・識別する機能を有した誘導弾に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
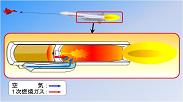
将来ガスジェネレータ要素の研究
ダクテッドロケットエンジンの主要構成品であるガスジェネレータの性能向上に資する固体ガス発生剤の研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
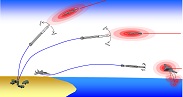
先進飛しょう体関連技術
超高速で飛来する小型目標を遠方で迎撃するために必要な誘導弾及び誘導弾システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
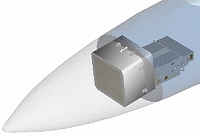
対空誘導弾高速化光波ドームの研究
将来の各種経空脅威に有効に対処するために、光波誘導弾の高速化及び対妨害性の向上に資する光波ドーム技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
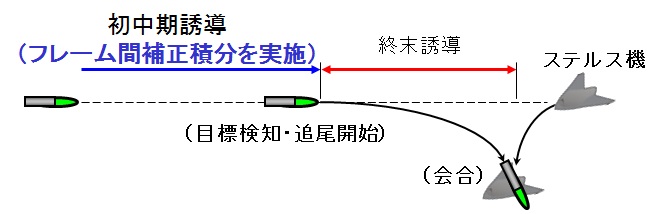
低RCS目標の早期検出技術に関する研究
将来の対空誘導弾への適用を想定し、移動目標に対して、高い目標検出性能を有する電波シーカの実現に必要な技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
直巻マルチセグメント・ロケットモータの研究
直巻FW技術及びマルチセグメント技術により、推進薬充填率の大幅な向上やマルチスラストを実現し、誘導弾の飛しょう性能を向上させる研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
低RCS対処ミサイル誘導制御技術の研究
ステルス化された目標に対処するミサイルの実現に必要な誘導制御技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
通信・ネットワーク
基幹連隊指揮統制システム
普通科連隊及び戦車連(大)隊等の部隊に装備し、コンピュータネットワークを構成して、彼我の状況を把握し、命令等を伝達することにより、火力・機動の指揮・統制を迅速・正確に行うマルチキャスト通信技術の評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
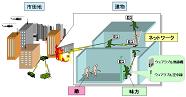
ネットワーク情報共有システムの研究
市街地や建物内等での戦闘状況下において、小型・軽量なウェアブル空中線を装着した各隊員で構成する無線ネットワークシステムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
新野外通信システム
新野外通信システムの構成要素のうち、SCA(Software Communications Architecture)に準拠したソフトウェア無線機及びアドホックネットワークアプリケーションの評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
電波・光波機器
スマートRFセンサの研究
レーダ、ESM、ECM、通信の複数の機能を組み合わせて協調制御することで、新たな機能を実現する多機能RFセンサシステムの構築技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
コンフォーマル・レーダ・システムの研究
覆域の拡大、多目標の同時捜索・追尾及び高分解能画像化表示等、航空機の外形形状に適合可能な先進的コンフォーマル空中線技術を適用したコンフォーマル・レーダ・システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
パッシブレーダ要素技術の研究
自ら電波を発することなく、既存のレーダ波や放送波を送信源とし、受信のみで動作する干渉型準パッシブレーダに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
壁透過レーダ技術の研究
ゲリラや特殊部隊により高まりつつある脅威に対処するため、建物の壁等の遮蔽物を透過させて、その向こう側にいる人物の位置、人数、動きのリアルタイム高精度な探知を実現する壁透過レーダ技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
マルチファンクションレーダ(FCS-3)の性能向上
捜索・追尾能力の向上を図り、小型・軽量化、高整備性を追求しつつ、遠距離から近距離、高高度から超低高度までのエリアをカバーできるFCS-3の性能向上に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
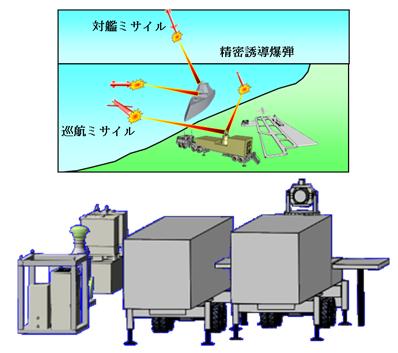
防空用高出力レーザ兵器に関する研究
護衛艦等の艦船の近接防空用や基地等の地上重要防護施設に適用し得る高出力レーザシステム構成要素に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
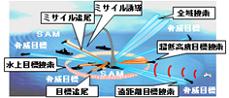
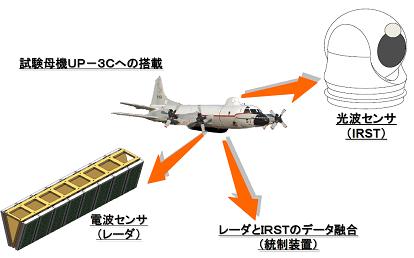
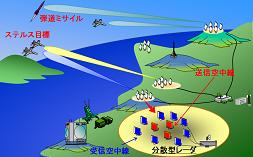
電波・光波複合センサシステムの研究
大型航空機に搭載し、遠方からステルス航空機(ST機)、巡航ミサイル(CM)及び弾道ミサイル(BM)の新たな対空脅威を早期に探知し、ウェポン等と連携して対処する遠距離探知センサシステムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
RCS計測評価技術の研究
小型航空機等のレーダ反射断面積(RCS)の屋外計測・評価手法に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
分散型レーダ技術の研究
将来の警戒管制レーダに求められる、ステルス機・戦域弾道ミサイル等の探知追尾性能、移設性、抗たん性、経済性等に優れたレーダ方式に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
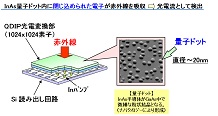
2波長赤外線センサ技術の研究
高温動作、量産性に優れ、目標物体の抽出、識別性能の向上が見込まれる2波長赤外線センサに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
光波スマートセンサ技術の研究
近赤外画像と中赤外画像を取得し、それらの融合処理が可能なスマート暗視装置に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
ロボット・その他
将来軽量橋梁技術の研究
有事、大規模災害時において、河川、地げき等に迅速に架設可能な将来軽量橋梁の構成要素に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
地上ロボット(市街地移動技術)の研究
建物の内部や物陰等の危険な場所へ隊員に先行して進出し情報を収集するロボットに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
携帯型小型情報収集器材の研究
建物内の死角や隙間に進入して情報収集を行う個人携行が可能な携帯型小型情報収集器材構成技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
検知技術の研究
国内最先端技術を利用し、大気中に散布された生物剤を、現場において15分以内に検知可能な我が国初の生物剤検知システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
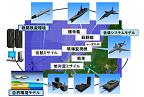
シミュレーション統合技術の研究
複数の脅威が存在する戦闘場面を仮想空間内に生成し、陸海空の各装備システムの性能を把握するとともに、将来の各装備システムの研究開発の方向性を検討するために使用するシミュレーション統合システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
新除染セット
新除染セットの構成要素のうち、精密器材について、腐食性がなく除染能力のあるガス等を発生させ、化学剤、生物剤を除染する技術の評価
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
CBRN対応遠隔操縦作業車両システム
汚染地域等に遠方から投入し、現場に迅速に到達して各種作業及び情報収集が実施可能なCBRN遠隔操縦作業車両システムに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
画像ジャイロ応用技術の研究
GPS妨害環境下で従来の航法装置の機能を補完し、機能を強化できる技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
車両型無人プラットフォーム技術の研究
情報収集、物資輸送等で使用する陸上無人機技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
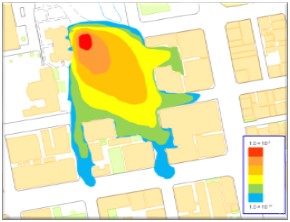
CBRN脅威評価システム技術の研究
CBRN有害物質の大気拡散を予測・評価し、汚染発生エリアを推定可能なシステムを構築するための研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
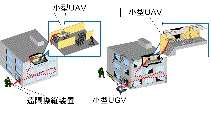
遠隔操縦式小型偵察システムの研究
テロや特殊災害によるCBRN汚染環境下等における、狭隘空間に進入しての偵察任務で使用する遠隔操縦式小型偵察システムの研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
多目的自律走行ロボットの研究
車両ロボットの悪天候環境及び人、車両等の移動障害物が存在する環境における自律走行機能向上、また、把持作業等に使用される車両ロボット搭載アームの遠隔操縦機能向上を目的とし、武力攻撃対処、災害派遣等に使用可能な多目的自律実走行ロボットに関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |
困難地形における走行・作業エリア環境認識向上技術の研究
CBRN対応遠隔操縦作業車両システムの情報統合による、広範囲な走行・作業エリアの環境認識向上技術に関する研究
| 概要図 | 評価時点(実施年月) |
|---|---|
 |