最北の飛行隊 〜守を力に〜
ヘリコプターの原理PRINCIPLE
どうやって飛んでるの?
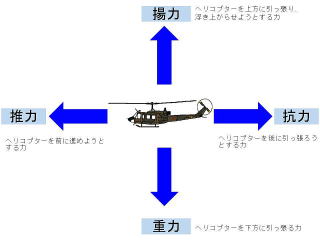
ヘリコプターが飛ぶ際、4つの力「揚力」「重力」「推力」「抗力」が常に働いています。これをコントロールし、上昇・降下・前進・後進・ホバリング(空中停止)などの飛行をしています。

揚力について簡単に説明します。
具体例を挙げると「竹とんぼ」を回転させると図のように空気が下に押し下げられ、竹とんぼは上に向かって押し上げられます。この力を揚力と言い、これにより空に舞い上がります。
「扇風機」が風を送る動作と同じです。
プロペラの回転が速く・面積が広いほど大きく風の力を得ることができます。
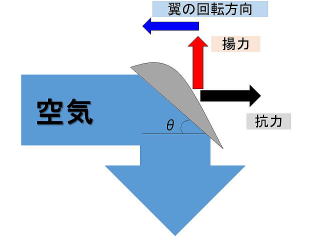
上図のように翼の角度を仰角と言い、θで表しています。
仰角が0だと揚力は発生せず、仰角を大きくしていくと揚力も上昇します。
しかし、ある角度を過ぎると抗力の方が揚力を上回り、直角(θ=90度)では揚力は0になり飛べなくなってしまいます。
ヘリコプターはローターの角度をコントロールし回し続けることにより空高く自由に飛んでいるのです。
テールローターの作用
竹とんぼは羽と一緒に竹軸も一緒に回っています。
しかしヘリコプターの機体は回転していません。それはテールローターのおかげです。
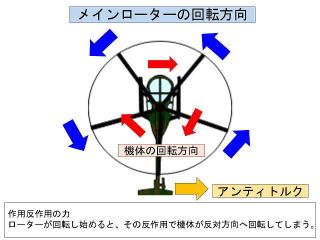
テールローターがないとブレードが回転した際に、作用反作用の法則により機体がブレードの回転方向と逆方向に回転してしまいます。
これをトルクと呼んでいます。
トルクによりこのままではヘリコプターは飛べません。
そこで回転方向と逆方向の力を発生させるためテールローターが必要なのです。
テールローターによってトルクを打ち消す力(アンティトルク)を生み出し、2つのローターをコントロールしてヘリコプターは色々な方向へターンしています。
操縦について
ヘリコプターの操縦は両手両足を使います。
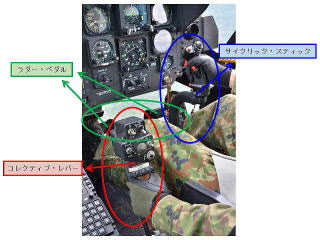
上図のように左手で「コレクティブ・レバー」、右手で「サイクリック・スティック」、両足で「ラダー・ペダル」の3種類を操作して操縦しています。
・「コレクティブ・レバー」
レバーを上下させることにより出力をコントロールし、高度・速度などを変化させます。
・「サイクリック・スティック」
スティックを傾けることにより、メインローターの回転面を変化させ任意の方向へ機体を進めます。
前進するならスティックを前に、後進するならスティックを後ろにそれぞれ傾けます。
・「ラダー・ペダル」
方足ずつペダルがあり、ペダルを調整することでテールローターをコントロールします。
右ペダルを踏み込むと機体は右を向き、左ペダルを踏み込むと機体は左を向きます。
また速度計や昇降計などの計器や色々なスイッチを操作することで、安全で安定した操縦が可能となっています。