

News
Advanced Defense Technology Center
Outline
The Advanced Defense Technology Center conducts the research on M&S*1, CBRN*2 defense technology, human engineering technology and robot systems as well as promoting research programs of future weapon and equipment systems incorporating advanced technologies.
*1 M&S: Modeling & Simulation
*2 CBRN: Chemical, Biological, Radiological, Nuclear
M&S/Advanced Technology Division
Research, test and evaluation on M&S technologies and advanced technologies applied to future equipments.
CBRN Defense Technology Division
Research, test and evaluation on CBRN detection, protection and defense systems technologies.
Soldier & Unmanned Systems Integration Technology Division
Research, test and evaluation on human engineering technologies, robot technology and soldier-unmanned integration technologies.
Research
Integrated Simulation System
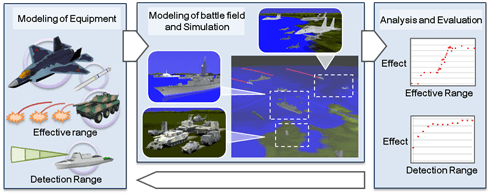
In case of studying concept of future equipment systems, this system can evaluate the performance of equipment systems which are mutually interacted in the virtual battle field. And this has a function of parametric study which can analyze the situation of whole virtual battle field under the condition of changing a specific model's parameter related to its performance gradually. This has been in operation at ATLA's departments of development and research centers.
Integrated Air Defense System Simulation
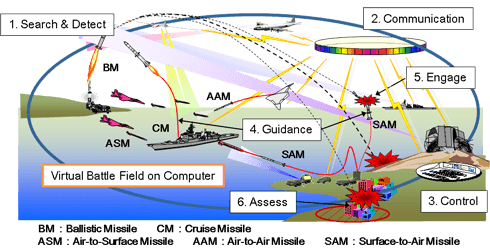
The Integrated Air Defense System Simulation is a simulation for the range from a system integration level to a system level. This is a computational simulation which can plan and validate the system concept for R D of future air defense weapon systems such as missile, radar and others.
Miniature Guided Missile System
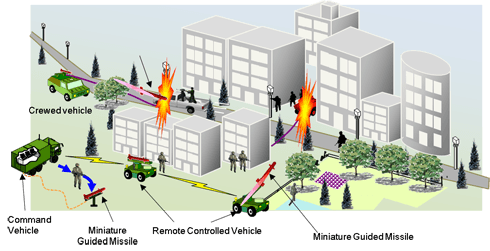
The miniature guided missile system which can be equipped with remote controlled platforms and be carried and fired by soldiers is researched.
Remote Control of Several Miniature Vehicles
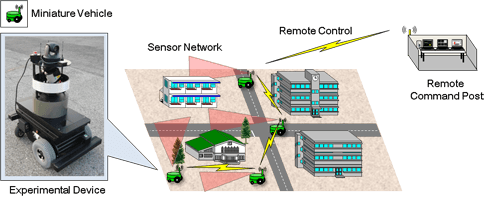
Remote control technology of several miniature vehicles applied with swarming control*1 and collaborative control*2 available for reconnaissance of an urban area with many blind spots is researched.
*1 Swarming control: Method to control a system using swarming
*2 Collaborative control: Method to control a system in limited communication environment by collaboration between agents
CBRN Threat Assessment System by Dynamic Correction Technology
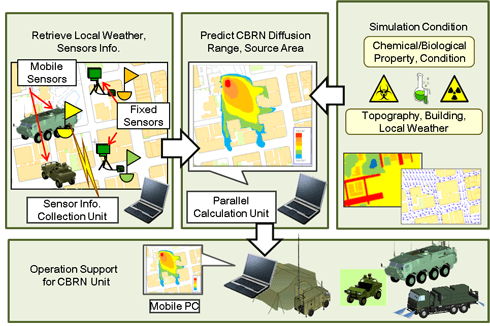
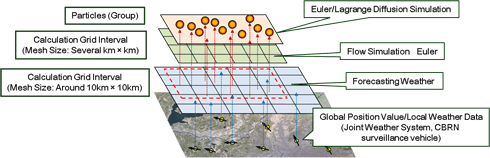
CBRN threat assessment system can predict the diffusion area of the CBRN pollution with the dynamic correction coming from CBRN sensor data and GPV/local weather conditions. This system will also estimate the CBRN threat or hazard assessment and provide it to CBRN unit in the future.
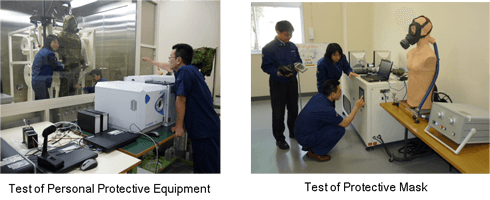
Research on Test and Evaluation of Personal Protective Equipment
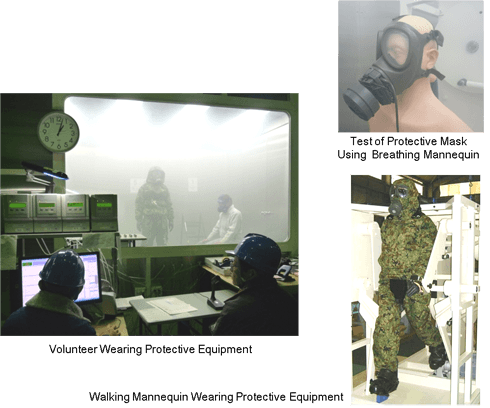
Based on communications with various developed nations, this research is employing the chamber and walking mannequin for test and evaluation of personal protective equipment.
Test at Facility for Personal Protective Equipment
Measuring the Radioactive Air Dust at High Altitude of Japan
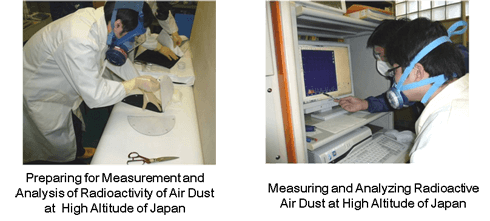
Measuring and analyzing radioactive air dust at high altitude above Japan have been continued every month since 1961, in collaboration with the flight by Air Self-Defense Force.
Biological Agent Detection System
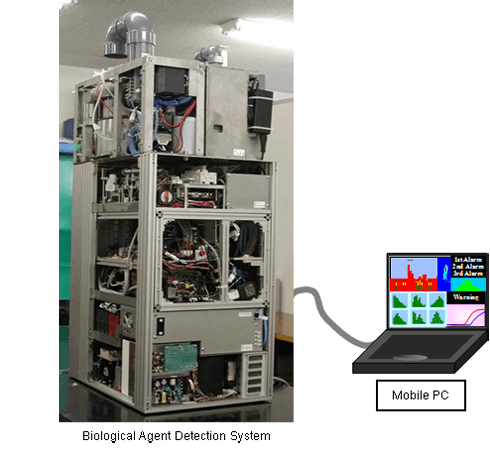
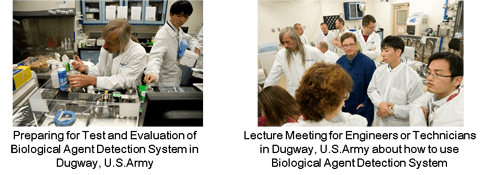
Biological Agent Detection System can automatically detect and identify biological agents aerosol.
Research on High-mobility Powered Suit
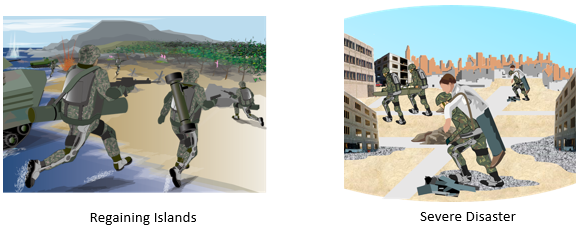
The High-mobility Powered Suit is expected to be used in situations where heavy loads and rapid movement are needed such as regaining islands, disaster relief, etc. This research is one of the robotic R&D efforts for the next generation social infrastructure, mentioned in Comprehensive Strategy on Science, Technology and Innovation 2017.
Research on Soldier & Unmanned Systems Collaboration
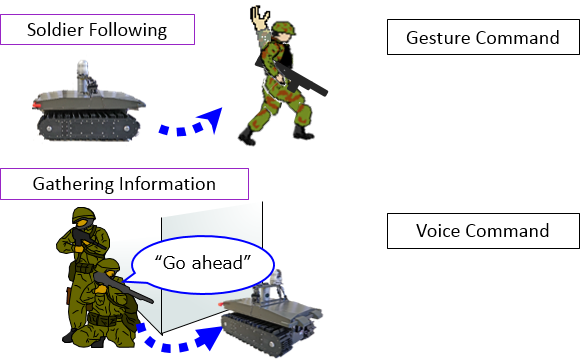
For the purpose of improving the survivability of an unmanned vehicle’s operator during military operations such as close combat, advanced control methods to include gesture / voice command and follow-me controls are being researched.
Research on Multipurpose Autonomous Robot Vehicle
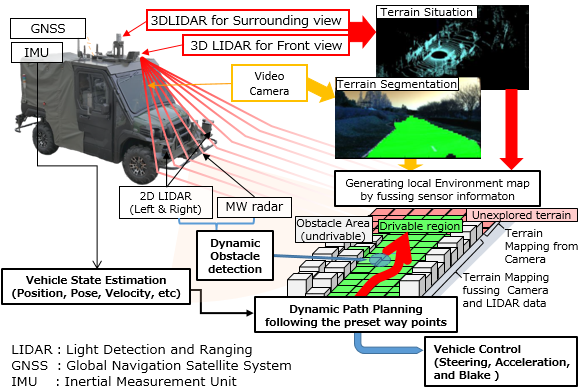
Research project on improving the autonomous driving capabilities on unpaved road, focusing on the applicability of dynamic obstacle detection and avoidance, such as pedestrian and moving automobile, and autonomous driving under the adverse weather conditions, such as rain or fog.
Research on Hyper-Robust Visual SLAM Technology
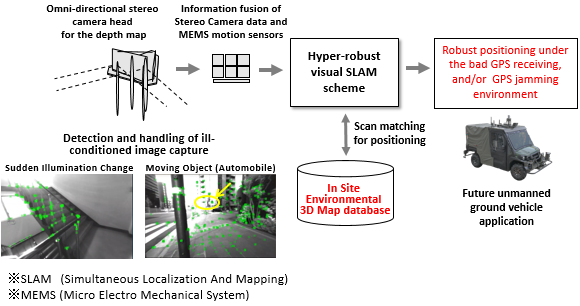
To make a big technological leap toward the practical robust visual SLAM scheme that would be used persistently in actual and dynamic environments by minimizing the fatal influences from moving objects and sudden illumination change, the hyper-robust visual SLAM technology is to be studied.
Research on the Life Support System of the Aircraft
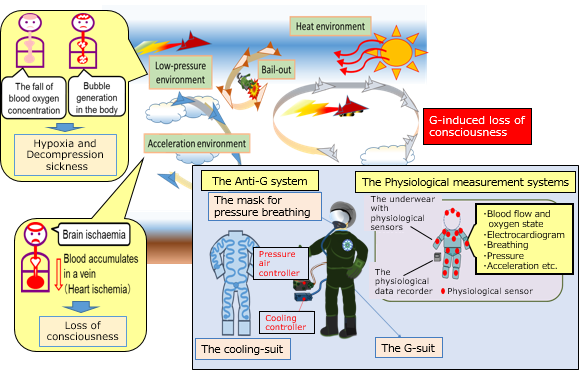
Research on the life support system for aircraft to cope with the aviation environment where acceleration and low pressure hypoxias are burdened at the same time.
Research on Estimation of Cognitive Workload using Wearable EEG and fNIRS
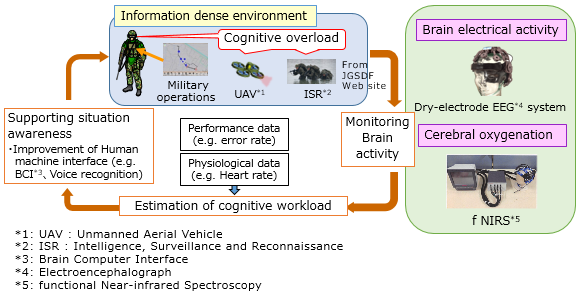
The installation of very-high technology such as informatization and networking is a radical change for soldiers and gives them a lot of stress and cognitive workload. To support soldiers, we investigate the estimation method of cognitive workload using a non-invasive brain measurement.